 Image Credit: Eric Heiden, Luigi Palmieri et al.
Image Credit: Eric Heiden, Luigi Palmieri et al.Abstract
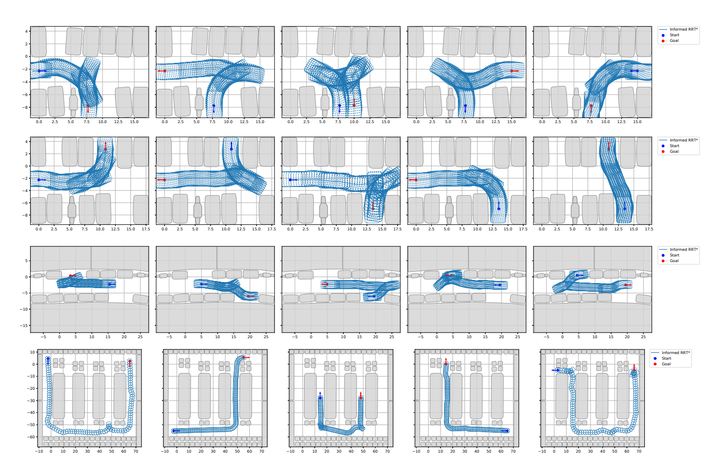
Planning smooth and energy-efficient motions for wheeled mobile robots is a central task for applications ranging from autonomous driving to service and intralogistic robotics. Over the past decades, a wide variety of motion planners, steer functions and path-improvement techniques have been proposed for such non-holonomic systems. With the objective of comparing this large assortment of stateof-the-art motion-planning techniques, we introduce a novel open-source motion-planning benchmark for wheeled mobile robots, whose scenarios resemble real-world applications (such as navigating warehouses, moving in cluttered cities or parking), and propose metrics for planning efficiency and path quality. Our benchmark is easy to use and extend, and thus allows practitioners and researchers to evaluate new motion-planning algorithms, scenarios and metrics easily. We use our benchmark to highlight the strengths and weaknesses of several common state-of-the-art motion planners and provide recommendations on when they should be used.