Task and Contact Optimization for Robot Manipulation
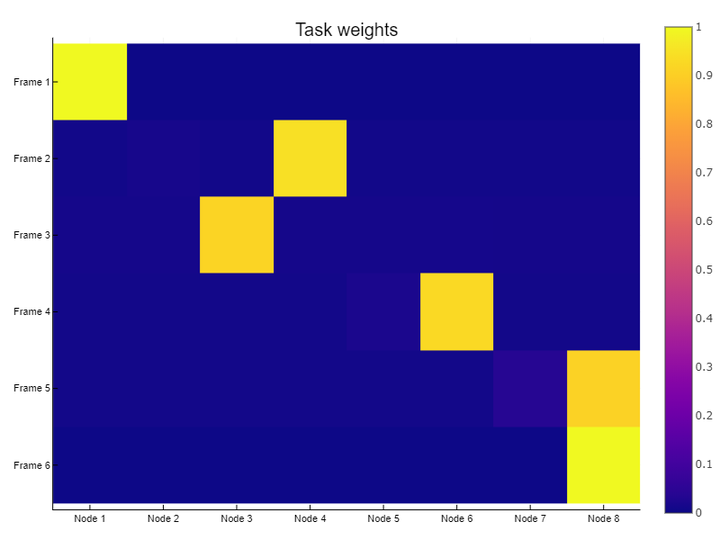 Image Credit: Eric Heiden
Image Credit: Eric Heiden- Coordinated high-level symbolic planning with low-level motion planner to complex contact planning problems.
- Formulated symbolic planning graph and STRIPS reasoning problems as a smooth optimization problem to be solved by gradient-based optimizaters.
- Integrated Contact-Invariant Optimization that considered contacts as continuous variables and extended CIO to optimizing contacts with multiple objects.
- Incorporated reverse-mode AD with ReverseDiff.jl to speed up gradient computation 2 and SNOPT7.jl as non-linear opNmizer.
- Setup URDFs and geometry prototypes for testing.