A Hierarchical Approach to Multi-Agent Path Finding
Abstract
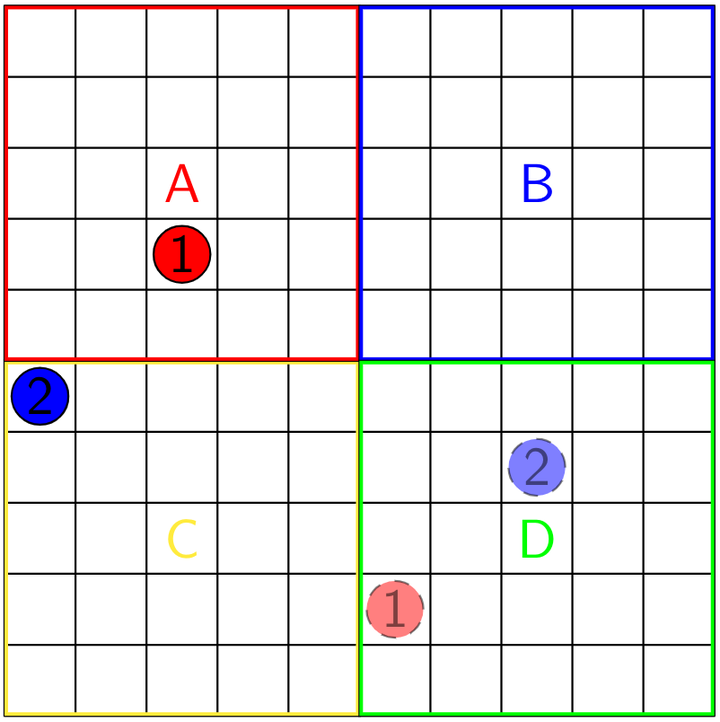
We propose a hierarchical framework for solving the Multi-Agent Path Finding (MAPF) problem. We spatially divide a large map instance into smaller sub-regions and use a high-level solver to guide agents through the sub-regions. Within each region, we integrate state-of-the-art sub-optimal solvers to find a set of conflict free paths.
Type
Publication
To appear in ICAPS 2021 Hierarchical Planning Workshop